
UNL team builds deep-water robot for Antarctic exploration
Released on 07/30/2014, at 2:00 AM
Office of University Communications
University of Nebraska–Lincoln

A University of Nebraska-Lincoln team's mission to build a new robot to advance research into the ecosystem under Antarctic ice may also eventually help NASA study one of Jupiter's moons.
The robot, known as Deep-SCINI (Submersible Capable of under Ice Navigation and Imaging), is designed to run deeper than previous missions under the leading edge of the Antarctic ice shelf.
The remotely operated underwater vehicle will be used for biological and oceanographic examinations near the grounding zone of the Ross Ice Shelf, an area where the ice shelf that is that is floating on ocean water (to the north) transitions to the West Antarctic Ice Sheet that is in contact with the underlying earth (to the south).
Deep-SCINI can be used to explore other areas within the ice shelf cavity beyond the scope of the existing project. It may also assist with proposed drilling activities for the multinational Antarctic Geologic Drilling (ANDRILL) program based at UNL.
The project builds on successes of the first SCINI vehicle, which was used to discover a new species of sea anemone that lives in burrows in the underside of Antarctica's Ross Ice Shelf. The International Institute for Species Exploration named the anemone among the top 10 species discovered in 2013.
For Deep-SCINI, UNL is building a vehicle that can handle a depth of 6,500 feet, or about 2 kilometers, said Bob Zook, the project's chief engineer. The original SCINI vehicle was built to operate at about 300 meters.
"By going deeper, we will be able to determine what kind of organisms live at these greater depths and distance from the ice shelf edge," Zook said.
A NASA grant awarded to Georgia Tech for its Sub-Ice Investigation of Marine and Planetary-analog Ecosystems, or SIMPLE, project funds the building of Deep-SCINI. The grant seeks to develop technologies to explore Antarctica's ice/ocean interface of sea ice and ice shelves.
Funded projects operate as an Earth analog for potential missions to explore Europa, one of Jupiter's moons that has a surface made up of water ice. The focus would be on better understanding microbial communities that live in the ecosystems under Antarctic ice.
SIMPLE is primarily focused on biogeochemical and physical studies of the ice/water interface under Antarctica's McMurdo Ice Shelf. The project uses a combination of ice-penetrating radar, remotely operated underwater vehicles and autonomous underwater vehicles. The principal investigator in the SIMPLE project is Georgia Tech's Britney Schmidt.
SIMPLE provided $358,000 toward the development of Deep-SCINI. The initial deployment and testing of the vehicle will be done through a collaborative venture with the Whillans Ice Stream Subglacial Access Research Drilling, or WISSARD project, which also involves the ANDRILL Science Management Office at UNL.
"Since the ANDRILL Science Management Office at UNL was involved with the developing, testing and using hot water drill systems to provide access through the ice in support of other projects in Antarctica, we facilitated a collaboration between the SIMPLE and WISSARD projects," said Frank Rack, executive director of the Science Management Office and an associate professor of earth and atmospheric sciences at UNL.
In January, the WISSARD hot water rig will melt holes through the southern boundary of the Ross Ice Shelf at the grounding zone to allow deployment of Deep-SCINI and other oceanographic and geological sensors and sampling devices.
"Without the collaboration with WISSARD, we would not be deploying the new robot this season," Zook said. "We're pretty excited to get it out into the field and see what this vehicle can accomplish."
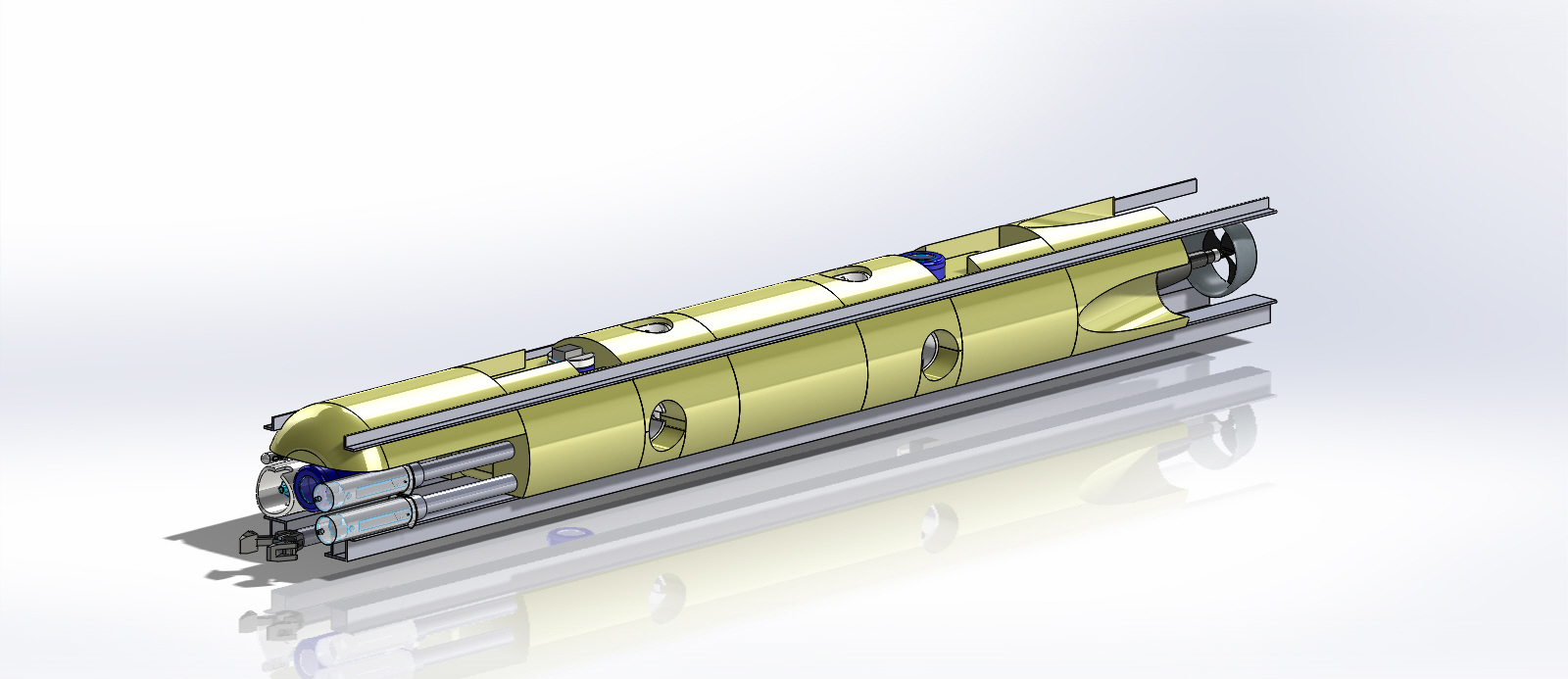
Deep-SCINI will be a larger and deeper-diving version of the first SCINI vehicle. Both are tube-shaped to gain access to water via the holes drilled in the ice. Deep-SCINI is almost 2 meters long with diameter of 23 centimeters and weighs 60 to 80 pounds. The original SCINI vehicle is nearly 1.5 meters long with a diameter of 15 centimeters and weighs 35 pounds.
Deep-SCINI will include five maneuvering thrusters, two recording cameras -- one pointed up, the other forward -- lights, a motorized clamp and a specialized device to collect biological specimens.
While used for biological study, the SCINI robot was designed to help ANDRILL research teams pick good drill sites and contribute to drill pipe installation underwater.
Other members of the Deep-SCINI research team are Justin Burnett, a graduate research assistant, and Alex Wilke, a 2014 UNL graduate with a degree in computer engineering.
Writer: Troy Fedderson, University Communications
News Release Contacts:
- Bob Zook, Antarctic Drilling Program
phone: 402-472-6723
Associated Media Files:
- SCINI team members Bob Zook (left) and Alex Wilke work with an electronic component of the new Deep-SCINI remote operated vehicle. The team plans to deploy the new underwater robot in October. (Troy Fedderson | University Communications)
- Proposed design for the Deep SCINI vehicle. (courtesy Science Management Office)