Students enrolled in CSE's 496/896 Robotics course will hold a demonstration of their final projects, open to anyone who would like to attend on Friday, December 9th at 2:30 on the 2nd floor of the Schorr Center. The demonstration will be held in the form of a competition, the object being to collect and deposit as many balls, as quickly as possible, by means of various devices attached to the bodies of the robots. The layout will be revealed the day of the competition, some of the balls' location being known, with the aid of visual landmarks, while others remain unknown. Each of the four groups will give a short presentation about their project, which will be followed by the competition itself. The class is taught by Carrick Detweiler, who co-heads the NIMBUS Lab on campus with Sebastian Elbaum. The students' Hovercraft project ties in with the current research of the NIMBUS Lab by familiarizing students with the problems faced by current research and by giving them a chance to be creative and to attempt to find solutions to these obstacles.
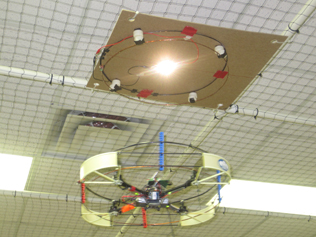
The aim of the NIMBUS Lab's current Unmanned Aerial Vehicle (UAV) research is to further autonomy in robotics to enable them to operate safely in the real-world. In addition, the NIMBUS Lab is exploring methods and techniques to enable UAVs to "provide the power to recharge batteries of wireless sensors and other electronics far removed from the grid through wireless power transfer, through the use of strongly coupled resonances," Dr. Detweiler explains. As a demonstration, the helicopter can remotely power a light, as it draws near, representing the ability to transfer a significant amount of power from the robot to the sensor without wires. Being more autonomous would enable these UAVs to do this in places that are difficult or impossible for humans to reach. These
locations would include sensors underneath bridges, underground sensors, and sensors in locations where security or aesthetic concerns prevent mounting solar panels.
The projects demonstrate an important problem: how to work with an unknown obstacle that moves quickly in an uncontrolled environment. This is one of the issues faced by researchers. The students, while learning the basics of controlling robots, will demonstrate with their Hovercraft the difficulty of working with these obstacles. Other problems faced are the detection of landmarks via an onboard camera, global localization, mapping paths through the environment in order to meet given aim, and finally, picking up the balls. The project involves building a Hovercraft, by means of a lightweight disk, with a hole in the middle, composed of a fan blowing down and thrusters that move around. Attached to the disk are the robots themselves, each embodying a different concept of the best way in which to address the task at hand. One has arms, another has two metal contraptions for gripping the balls. The amount of thought and the intricate detail put into the projects are clear just by looking at them.
Dr. Detweiler summarized the process of the construction for Bits & Bytes: "Each of the labs for the course helped the students develop the knowledge and systems needed to complete some aspect of the final competition, but it is up to them to put everything together to achieve the goals of the competition. The hovercraft themselves are mostly built out of materials available at home improvement stores, plus some RC fans, and custom control electronics. Each group designed their own grippers for picking up balls, using material ranging from legos and balsa wood to steel." Not only have the students achieved a lot through the course but, by means of the demonstration and through the work of the NIMBUS Lab, the research is far reaching.
If you are interested in Hovercraft or just need some friendly competition, come along and witness the demonstration for yourself.